Patent Number: US 2020/0148484 A1
Inventors: William H. White, Alain A. Mangiat, Josue E. Salazar Vanoye, Colin D. Harper
Abstract
Description
BACKGROUND
The present disclosure relates to teaching the pick and place locations for an automated programming system job on an Automated Programming System, hereafter “APS.” Prior to this invention, operators were required to manually assist with teaching each device pick and place location using semi-automated methods. Operators were required to manually load and unload devices for each pick or place point and then assist the APS in determining the X, Y, Z, and Theta target location for each workflow pick or place point before the full productivity of the job could begin.
SUMMARY
Disclosed herein are automated methods to setup or teach the pick and place locations for an automated programming system job on an Automated Programming System, hereafter “APS.” This reduces the setup time, reduces the level of operator skill required and improves setup accuracy, improves job yield, and reduces the frequency of human intervention required. Once the system is configured with the blank devices that will be programmed, input/output peripherals, socket adapters, and the feature is invoked, the system will teach the job and begin processing (programming devices) without operator intervention.
With fully automated self-teaching, operator involvement in the job set-up process is greatly reduced. The initial job set-up of input/out locations and peripherals is familiar Blank devices in media (tape, tray, tube) are loaded and Input/Output peripheral locations are taught. From that point, the process becomes radically different and more productive.
Using multiple pick and place cycles and analyzing results with a mathematical model, the APS will automatically determine, retain and adjust as necessary the target locations for pick and place locations within the programming job workflow. The initial, imprecise locations may be predetermined at the factory before shipment, or subsequently established at the customer location. Alternatively, a camera will assist to identify and establish each target pick or place point using machine vision algorithms.
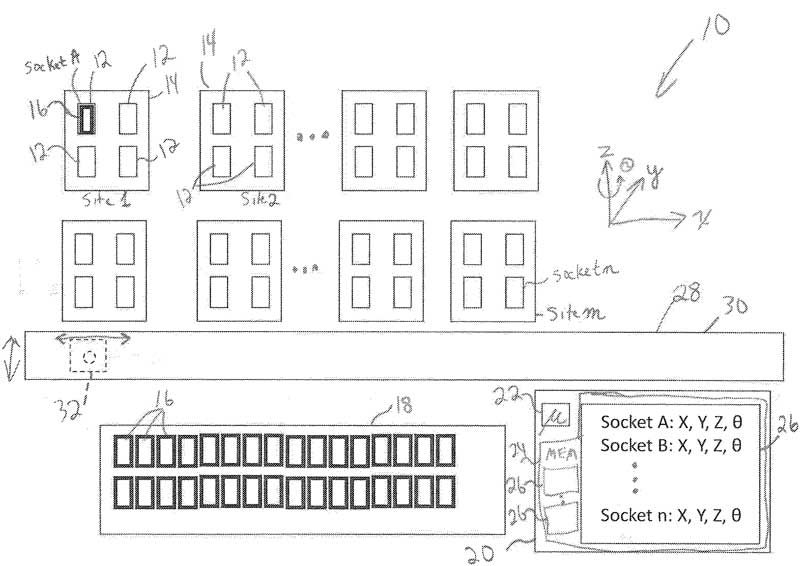
Each pick and place point has a predetermined location, unique to each APS. The operator may place a blank device in socket A in the master programming site (typically Site 1). The z-height of the first device will be used for all subsequent devices at the respective socket locations. The APS then picks the device from socket A and moves it in succession to sockets B through “n” to establish the X, Y, Z, and Theta locations for each socket. After the master site has been taught, the APS subsequently moves the device to all of the other sites and sockets installed on the machine. After all programming sites and sockets are taught, the device is placed in socket A of the master site, the APS loads all sockets with blank devices, and programming begins.
Alternatively, the programming job begins as each site is taught and before the remaining sites are taught so that production output can begin “immediately.” Alternatively, all parts are placed into sites automatically using computed locations and/or machine vision or sensors. Alternatively, additional teach locations such as input peripherals, output peripherals, and marking peripherals are taught automatically. Alternatively, another method is used to teach the Z height.
The operator can walk away from the APS as soon as the auto-teach process begins. The machine then proceeds to teach and start running the job autonomously. In prior implementations, the operator had to continue to give the machine attention and was unable to walk away from the APS until the job started running.
In one embodiment, the operator only has to manually place at most one device into a socket. In prior implementations, the operator was required to place multiple devices into sockets.
In one embodiment, each blank device that is used for teaching is used to teach at most one socket. In prior implementations, a single device was moved from socket to socket to teach multiple sockets, which could cause some mechanical degradation of the device.
This automated system offers greater accuracy and repeatability than human operators. By automatically identifying, predicting, and teaching each pick and place location within the APS workflow, job setup time can be greatly reduced, leading to higher system productivity per job and per year. Further, teaching accuracy and repeatability improves system yield and quality. By automating the teaching process, the requirement for highly skilled operators is reduced, potentially lower the labor burden for the programming process.